



- 您当前的位置是:首页 >人工智能及应用 > B智能机器人与机器视觉(高职)
- B智能机器人与机器视觉(高职)
-

-
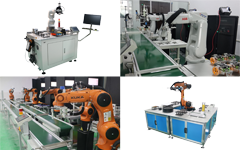
ROS移动与搬运机器人学习平台eAI2600
产品型号:eAI2600
ROS移动与搬运机器人学习平台eAI2600
- 详细内容
-
硬件参数
移动机器人主机:
驱动方式:差分驱动
轮子数量:4个
主动轮直径:120mm
负载:50kg
最大速度:0.8m/s,最大导航速度 0.3m/s
续航时间:4-6小时
通信接口:BLE/USB-UART
工业编码器:600线2相
整体尺寸:直径405mm×高210mm
导航扫描单元:
扫描测距:360度全方位扫描测距
测距精度:测距误差小,精度高达1%
测距范围:不低于10m
测距频率:5Hz~12Hz
角度分辨率:0.61~0.65
高速测距:测距频率可达4000Hz
视觉扫描单元:
深度范围:0.6-8米
精度:±1-3mm(1m范围内)
深度FOV:H 58.4°V 45.5°
彩色FOV:H 66.1°V 40.2°
支持操作系统:ROS/Android/Linux/Windows/7/8/10
四轴机器人:
最大负载:0.5kg
工作范围:320mm
轴数:4轴
重复定位精度:±0.2mm
轴运动范围:
(1)1轴: ±90°,320°/s;
(2)2轴:0°to +85°,320°/s;
(3)3轴:-10°to +95°,320°/s;
(4)4轴:±90°,480°/s。
重量:4kg
环境温度:-10℃~60℃
通讯接口:支持UBS/WiFi/Bluetooth
功率:60W Max
控制器:集成控制器
扩展I/O接口:支持可配置为模拟信号输入或PWM输出,可控12V电源输出,通讯接口,步进电机驱动等接口
机器人自主定位导航系统:
CPU:i5_4200U(1.6GHz)
内存硬盘:4GB RAM,64GB固态硬盘
软件系统:Ubuntu16.04+ROS Kinetic
操作系统:基于ROS机器人操作系统,支持Web API;可扩展丰富的SDK资源,利于二次开发
手动建图:通过用户手动控制探索需要工作的区域并建立地图
自动建图:可以无需人为干扰的情况下,自动探索室内环境,并构建室内地图
导航避障:融合激光雷达等传感器实现空间环境避障,实时更新地图
激光雷达:具备基于激光雷达的SLAM算法,可实现建立地图,自主导航,自主避障等功能
遥控:可实现Andiord手机APP控制,实现多目标点之间自主巡航
应用开发与实训案例
1、ROS简介与ROS开发环境搭建;
2、ROS体系架构及主要环境——文件系统介绍;
3、ROS体系架构及主要环境——计算图介绍;
4、ROS体系架构及主要环境——通信机制介绍;
5、主题与服务介绍;
6、3D可视化工具介绍与使用;
7、ROS机器人的SSH 访问及基本配置;
8、ROS机器人vi的基本使用;
9、ROS机器人基本移动控制(Python编程);
10、ROS机器人角速度、线速度校正;
11、ROS机器人IMU的自动校正(Python编程);
12、ROS机器人PID动态调试;
13、ROS机器人OpenCV_Apps图形处理;
14、ROS机器人视觉颜色、形状识别(Python编程);
15、ROS机器人视觉条码、二维码识别(Python编程);
16、ROS机器人视觉文本、数字识别(Python编程);
17、ROS机器人视觉巡线(Python编程);
18、ROS机器人雷达跟随(Python编程);
19、ROS机器人激光雷达SLAM构建地图(Python编程与RVIZ使用);
20、ROS机器人选择区域自动构建地图(Python编程);
21、ROS机器人用Hector算法构建地图(Python编程);
22、ROS机器人Karto算法构建地图(Python编程);
23、ROS机器人多点导航(Python编程);
24、ROS机器人SLAM激光导航(Python编程);
25、ROS机器人物料抓取与搬运(Python编程);
26、ROS机器人安卓手机App控制与图像监控(Android编程);
27、ROS机器人安卓手机App建地图(Python编程与Android编程);
28、ROS机器人安卓手机App导航(Python编程与Android编程)。
- 上一篇:ROS移动机器人学习平台eAI2400
- 下一篇:智能服务机器人eAI3000
