



- 您当前的位置是:首页 >人工智能及应用 > C人工智能系统平台(本科)
- C人工智能系统平台(本科)
-

-
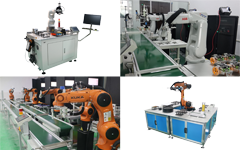
智慧物流开发系统eAI8400
产品型号:eAI8400
智慧物流开发系统eAI8400
- 详细内容
-
移动与搬运机器人
移动机器人主机:
驱动方式:差分驱动
轮子数量:4个
主动轮直径:120mm
负载:50kg
最大速度:0.8m/s,最大导航速度 0.3m/s
续航时间:4-6小时
通信接口:BLE/USB-UART
工业编码器:600线2相
整体尺寸:直径405mm×高210mm
机器人自主定位导航系统:
CPU:i5_4200U(1.6GHz)
内存硬盘:4GB RAM,64GB固态硬盘
软件系统:Ubuntu16.04+ROS Kinetic
操作系统:基于ROS机器人操作系统,支持Web API;可扩展丰富的SDK资源,利于二次开发
手动建图:通过用户手动控制探索需要工作的区域并建立地图
自动建图:可以无需人为干扰的情况下,自动探索室内环境,并构建室内地图
导航避障:融合激光雷达等传感器实现空间环境避障,实时更新地图
激光雷达:具备基于激光雷达的SLAM算法,可实现建立地图,自主导航,自主避障等功能
遥控:可实现Andiord手机APP控制,实现多目标点之间自主巡航
导航扫描单元:
扫描测距:360度全方位扫描测距
测距精度:测距误差小,精度高达1%
测距范围:不低于10m
测距频率:5Hz~12Hz
角度分辨率:0.61~0.65
高速测距:测距频率可达4000Hz
视觉扫描单元:
深度范围:0.6-8米
精度:±1-3mm(1m范围内)
深度FOV:H 58.4°V 45.5°
彩色FOV:H 66.1°V 40.2°
支持操作系统:ROS/Android/Linux/Windows/7/8/10
四轴机器人:
最大负载:0.5kg
工作范围:320mm
轴数:4轴
重复定位精度:±0.2mm
轴运动范围:
(1)1轴: ±90°,320°/s;
(2)2轴:0°to +85°,320°/s;
(3)3轴:-10°to +95°,320°/s;
(4)4轴:±90°,480°/s。
重量:4kg
环境温度:-10℃~60℃
通讯接口:支持UBS/WiFi/Bluetooth
功率:60W Max
控制器:集成控制器
扩展I/O接口:支持可配置为模拟信号输入或PWM输出,可控12V电源输出,通讯接口,步进电机驱动等接口
协作机器人
机器人本体:
单臂臂展:800mm
单臂负载:5kg
自由度:6个
单关节运动速度:180°/s
单关节运动范围:360°
重复精度:±0.03mm
爪手开度:60mm
爪手夹持力:1kg
机器人本体重量:50kg(不含底座)
示教器:Linux系统、8英寸全液晶触摸屏
编程方式:示教编程、离线编程、拖动示教
总线协议:EtherCAT、PowerLink
软件接口:支持C/C++、Lua、Python开发,支持ROS系统、API
I/O数量:16路输入+16路输出数字量I/O
电源:AC220V,50-60Hz
开源智能视觉检测系统
1、开源智能视觉检测系统,主要是配合工业机器人做智能检测工件角度缺陷及自动对位,以及工业机器人视觉学习开发使用;
2、进口工业相机
2.1 像素:130W像素;
2.2 分辨率:1280×960;
2.3 像素尺寸:3.75μm× 3.75μm;
2.4 光谱:彩色;
2.5 支持自定义AOI,降低分辨率可提高帧率;
2.6 三种工作方式:连续采集、软触发采集、外触发采集;
2.7 支持GENICAM接口,可直接连接LabVIEW等第三方软件;
2.8 标配Robovision视觉系统和丰富的二次开发实例源码,开放SDK;
2.9 配备工业镜头,C-Mount接口,f=16mm;
2.10 配套环形光源,直径70mm,照射角度90度,带模拟控制器;
2.11 机器视觉兼容NI Vision Builder for Automated Inspection、Vision Acquisition Software等视觉开发环境;
2.12 提供NI Vision Builder for Automated Inspection、Vision Acquisition Software编写的案例程序,主要包括模板匹配、零件识别、字符识别、条码识别、二维码识别等。
自动拧螺丝装配系统组件1、自动拧螺丝装配系统实现了在自动装配过程中进行螺丝拧紧的功能,能够自动完成吸取螺丝,拧紧螺丝的完整过程;
2、包含知名品牌自动螺丝排序机、进口品牌气动拧螺丝机等;
3、适应螺丝范围:M2-M4之间;
4、视觉识别精度为:±1mm;
5、包含螺丝排序机;
6、交流电源:AC110-240V;
7、螺丝长度范围:小于或等于20MM;
8、螺纹形状:M攻螺钉;
9、机器人工具盘上自带自动电批;
10、扭力范围:20kg±0.3%;
11、空载转速:1300no/min±10%;
12、力矩重复精度:±0.3%。
自动分拣插件组件1、该单元包含了原始物料区和分拣插件成品区;
2、整个过程中有工业视觉自动判断物块的类型,工业机器人快速响应分类过程;
3、分拣、插件通过视觉识别物块的类型,模拟了工业场合3C等电子行业的产品的分拣,插件过程;
4、具有1个分拣插件工装盘,对应插装分拣物料;
5、物料为铝合金或者工程塑料,大小为:直径23mm至37mm之间;
6、捕获识别物料范围为:100mm×100mm之间;
7、精度:±0.5mm;
8、配合视觉识别精度:99.8%;
9、分拣吸嘴安装在机器人末端;
10、配备圆形、三角形、正方形、六边形料块红色和黄色各1套,并且设置了1套黄色缺陷物料。
PLC及电气控制系统1、国际知名品牌PLC;
2、集成16路输入和16路输出IO口;
3、内置高达64K大容量的RAM存储;
4、内置业界最高水平的高速处理0.065μS/基本指令;
5、控制规模:32(包括CC-LINK I/O)点;
6、内置独立3轴100kHz定位功能;
7、支持数据链路 RS-232C.RS-485,RS-422,N:N网络、并联链接、计算机连接CC-Link,CC-Link/LT,MELSEC-I/O链接;
8、提供相关电气连接线与附属器件。
触摸屏1、尺寸(英寸):7英寸;
2、CPU主板:Cortex-A8,600MHz;
3、液晶显示屏分辨率:800×480;
4、触摸屏:四线电阻式触摸屏,分辨率4096×4096;
5、显示:真彩,65535色;TFT液晶显示,LED背光;
6、液晶屏亮度:200cd/m2;
7、内存:128M;
8、存储设备:128M FLASH;
9、组态软件:MCGS嵌入式组态软件(运行版);
10、提供与PLC通讯端口线和工控机连接的端口线。
智能装配组件1、工件定位工装盘一套;
2、气动夹具一套;
3、装配工件5套。
快换装置1、1拖3快换模块,支持多种末端工具;
2、每个快换装置均具有气路和电路接口,支持各种执行端应用;
3、末端负载:1kg。
自动夹爪1、气动驱动;
2、工业环境设计,高可靠性;
3、夹爪适应工件宽度:20~60mm;
4、抓取最大负载:1.5kg。
应用开发案例ROS移动机器人案例
1、ROS机器人基本移动控制(Python编程);
2、ROS机器人角速度、线速度校正;
3、ROS机器人IMU的自动校正(Python编程);
4、ROS机器人PID动态调试;
5、ROS机器人OpenCV_Apps图形处理;
6、ROS机器人视觉巡线(Python编程);
7、ROS机器人雷达跟随(Python编程);
8、ROS机器人激光雷达SLAM构建地图(Python编程与RVIZ使用);
9、ROS机器人选择区域自动构建地图(Python编程);
10、ROS机器人多点导航(Python编程);
11、ROS机器人SLAM激光导航(Python编程)。
ROS开源案例
1、Moveit!图形控制界面控制机械臂运动;
2、基于ROS关节空间和笛卡尔空间运动指令使用;
3、基于ROS工具 I/O 操作;
4、基于ROS气动爪手控制;
5、基于ROS搬运案例;
6、基于ROS自动装配案例;
7、基于ROS智能视觉分拣案例。
基于Python/C++案例
1、关节运动、直线运动、圆弧直线运动、圆与圆弧运动案例;
2、MODBUS-TCP通讯案例;
3、软笔写字案例;
4、绘图案例;
5、搬运码垛案例;
6、自动装配案例;
7、智能分拣案例。
图形化编程案例
1、关节运动、直线运动、圆弧直线运动、圆与圆弧运动案例;
2、绘图案例;
3、搬运码垛案例;
4、自动分拣案例。
计算机视觉开源案例
1.视觉定位
1.1 原点视觉定位
1.2 装配视觉定位
2.视觉测量
2.1 距离与长度测量
2.2 角度测量
2.3 圆弧与正圆、椭圆测量
3.视觉识别
3.1 手机电池生产日期检测
3.2 车牌及号码检测
3.3 条码、二维码识别
3.4 物料形状、颜色识别
3.5 物料视觉识别与分拣
4.视觉检测
4.1 零件缺陷检测
4.2 产品质量检测
- 上一篇:微型智能制造工厂开发系统eAI8200
- 下一篇:人工智能计算与数据系统平台
